Kecerdasan Artifisial
Pertemuan 01
Pengantar AI dan Agen Cerdas
Mata Kuliah: Kecerdasan Artifisial (AI401) | 3 SKS
🎯 Capaian Pembelajaran
Setelah pertemuan ini, mahasiswa mampu:
- Menjelaskan definisi dan sejarah perkembangan AI
- Membedakan empat pendekatan dalam AI
- Menjelaskan konsep agen cerdas dan lingkungannya
- Mengidentifikasi lima jenis agen cerdas
- Menganalisis karakteristik lingkungan tugas
- Menerapkan kerangka PEAS untuk analisis sistem AI
📋 Agenda Hari Ini
Bagian 1
- Definisi AI
- Sejarah AI
- Empat Pendekatan AI
Bagian 2
- Konsep Agen Cerdas
- Jenis-jenis Agen
- Karakteristik Lingkungan
- Kerangka PEAS
🤖 Apa itu Kecerdasan Artifisial?
Kemampuan yang ditiru:
- 🧠 Penalaran (Reasoning)
- 📚 Pembelajaran (Learning)
- 🧩 Pemecahan Masalah (Problem Solving)
- 🎯 Pengambilan Keputusan (Decision Making)
Contoh AI di Sekitar Kita
🏠 Kehidupan Sehari-hari
- Virtual Assistant (Siri, Alexa)
- Rekomendasi Netflix/Spotify
- Filter spam email
- Face unlock smartphone
🎖️ Bidang Pertahanan
- Drone otonom
- Sistem radar cerdas
- Analisis citra satelit
- Cybersecurity AI
📜 Sejarah Singkat AI
| Tahun | Peristiwa |
|---|---|
| 1950 | Alan Turing mengusulkan "Turing Test" |
| 1956 | Dartmouth Conference - lahirnya istilah "AI" |
| 1997 | Deep Blue mengalahkan Kasparov (Catur) |
| 2016 | AlphaGo mengalahkan Lee Sedol (Go) |
| 2022+ | Era Large Language Models (ChatGPT) |
🧪 Turing Test
Prosedur:
- Penguji berkomunikasi via teks dengan mesin dan manusia
- Penguji tidak tahu mana yang mesin
- Jika tidak bisa membedakan → Mesin "lulus"
❄️ AI Winter
Periode penurunan minat dan pendanaan AI:
- Keterbatasan hardware
- Kompleksitas kombinatorial
- Expert systems gagal scale
- Biaya maintenance tinggi
💡 Pelajaran: Ekspektasi harus realistis dengan kapabilitas teknologi
🔄 Empat Pendekatan dalam AI
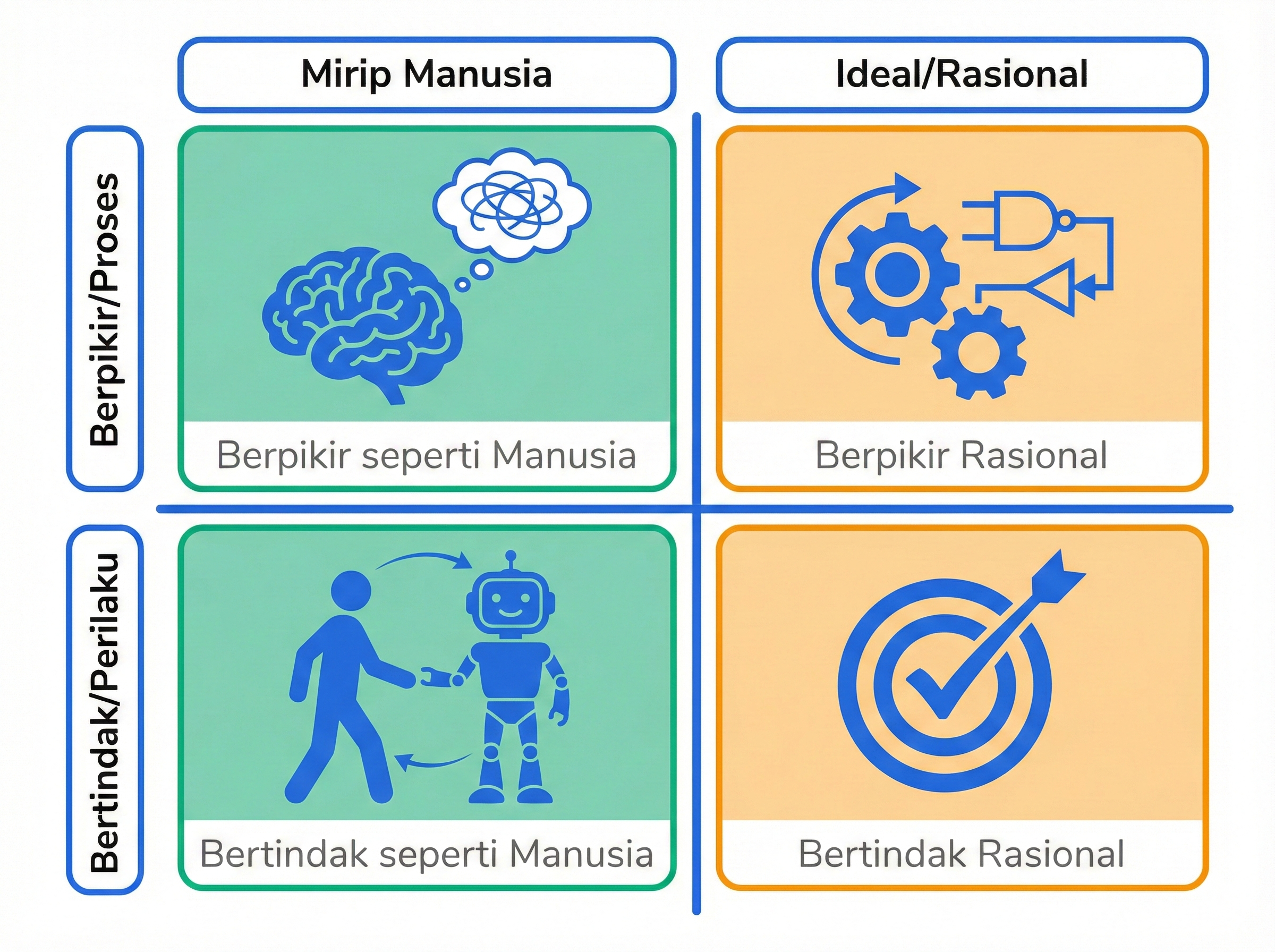
Gambar 1.1: Matriks empat pendekatan dalam AI
Pendekatan "Berpikir"
🧠 Berpikir seperti Manusia
Mensimulasikan proses kognitif manusia
Bidang: Cognitive Science
⚙️ Berpikir Rasional
Menggunakan logika formal untuk penalaran
Bidang: Logic, Mathematics
Pendekatan "Bertindak"
👤 Bertindak seperti Manusia
Perilaku tidak dapat dibedakan dari manusia
Benchmark: Turing Test
🎯 Bertindak Rasional ⭐
Memilih tindakan untuk hasil optimal
Pendekatan paling populer di AI modern
🎯 Rational Agent
⚠️ Rational ≠ Omniscient (Maha Tahu)
Agen rasional memaksimalkan hasil berdasarkan informasi yang tersedia, bukan hasil aktual.
🤖 Konsep Agen
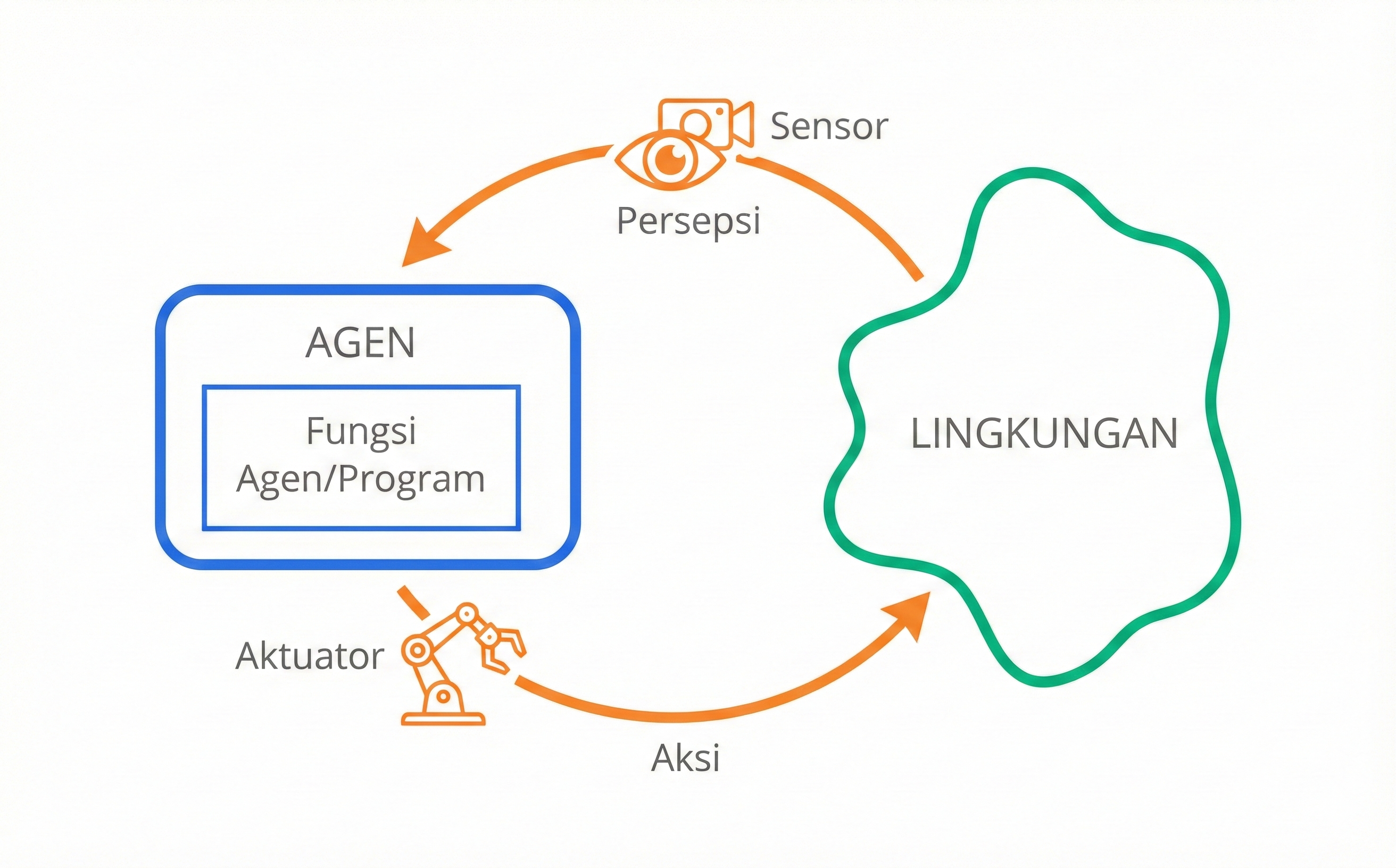
Komponen Agen
| Komponen | Fungsi | Contoh (Robot) |
|---|---|---|
| Sensor | Menerima input dari lingkungan | Kamera, LIDAR, microphone |
| Aktuator | Melakukan tindakan | Motor, speaker, display |
| Agent Function | Memetakan percept → action | Program kontrol |
Percept dan Percept Sequence
- Percept: Input yang diterima agen pada satu waktu
- Percept Sequence: Sejarah lengkap semua percept
Agent Function (matematis):
f : P* → A
P* = semua percept sequence, A = semua tindakan
🏗️ Lima Jenis Agen Cerdas
- Simple Reflex Agent - Hanya berdasarkan percept saat ini
- Model-Based Reflex Agent - Memiliki internal state
- Goal-Based Agent - Mempertimbangkan tujuan
- Utility-Based Agent - Mengukur "kebahagiaan"
- Learning Agent - Belajar dari pengalaman
↑ Kompleksitas meningkat ↑
1️⃣ Simple Reflex Agent
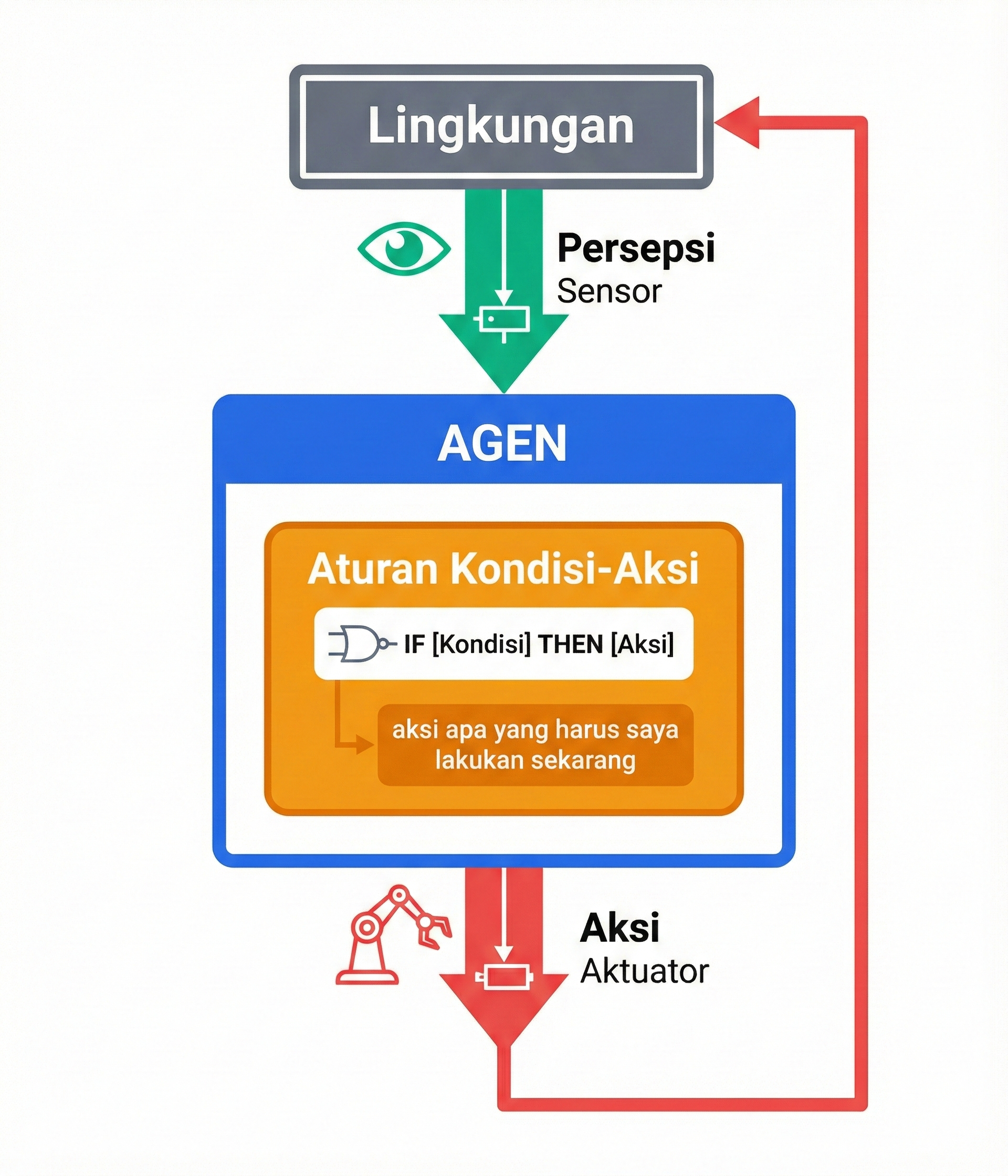
Karakteristik:
- Aturan IF-THEN sederhana
- Tidak ada memori (stateless)
- Sangat cepat
- Hanya untuk fully observable
Contoh: Thermostat
IF suhu > 25 THEN matikan_AC
2️⃣ Model-Based Reflex Agent
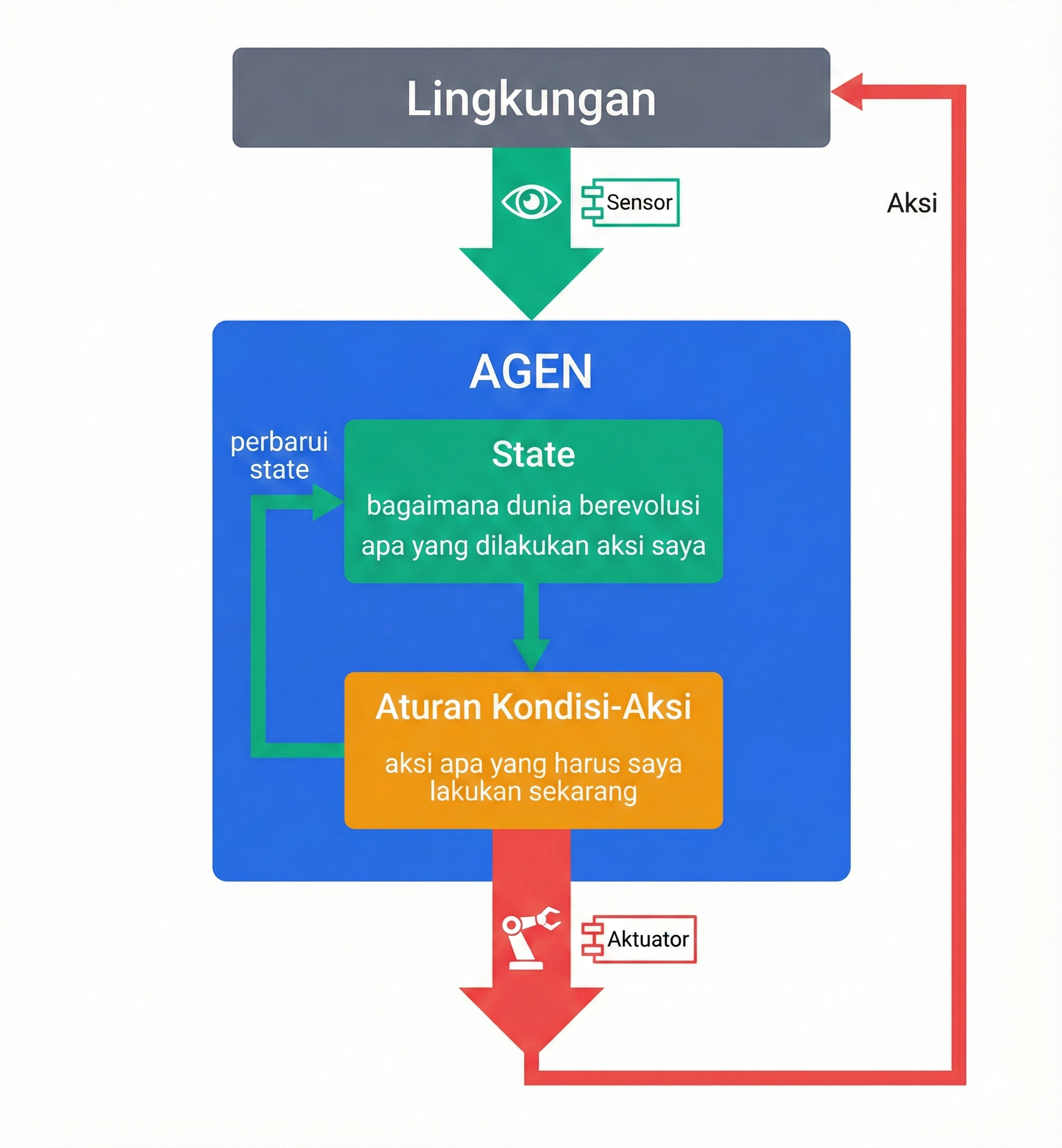
Tambahan dari Simple Reflex:
- Internal State - Menyimpan informasi
- Transition Model - Bagaimana dunia berubah
- Sensor Model - Interpretasi percept
Contoh: Robot yang mengingat posisi objek yang pernah dilihat
3️⃣ Goal-Based Agent
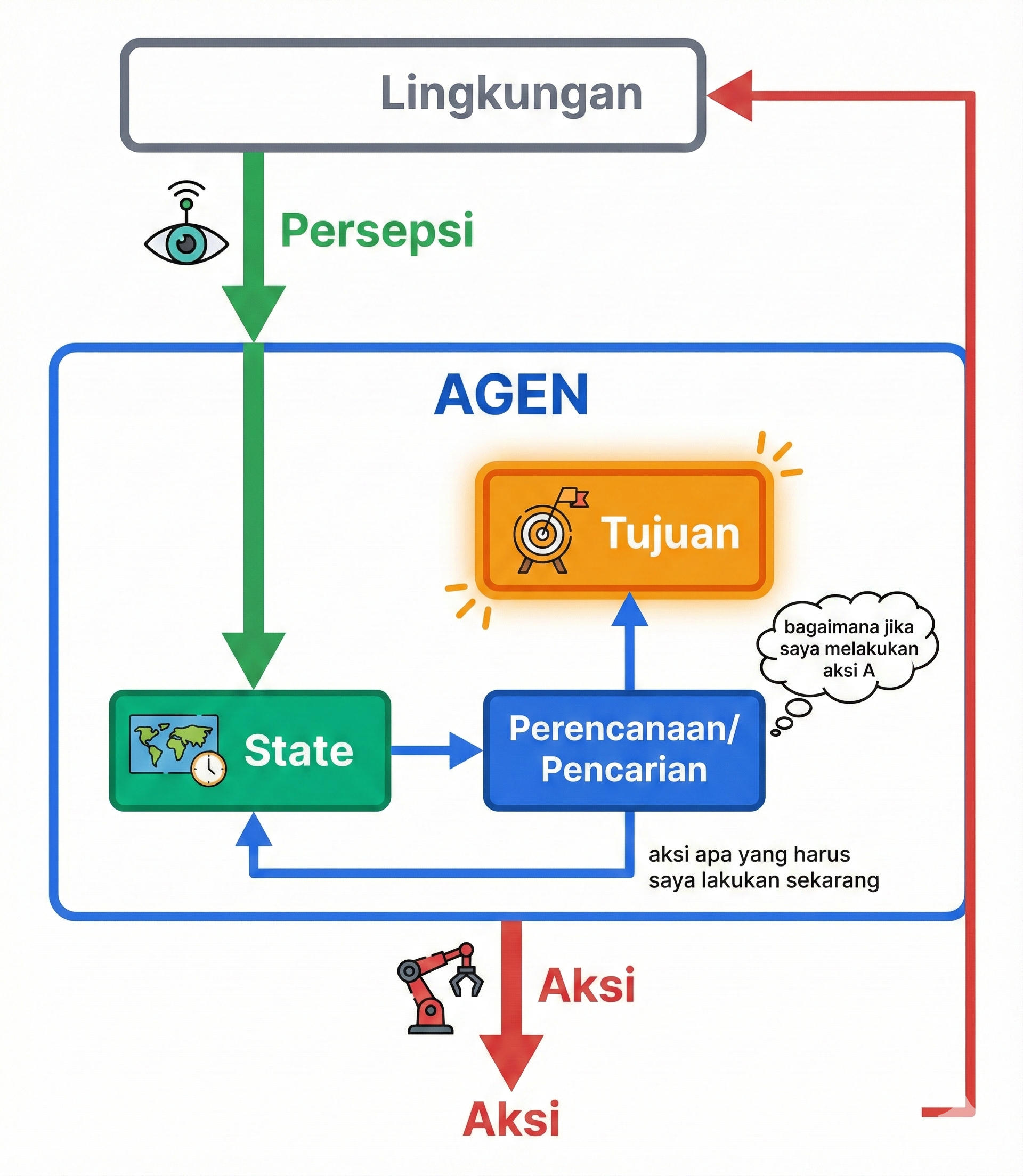
Tambahan dari Model-Based:
- Goal - Keadaan yang ingin dicapai
- Planning - Mencari cara mencapai goal
Lebih fleksibel! Ubah goal = ubah perilaku
Contoh: Robot navigasi dengan tujuan tertentu
4️⃣ Utility-Based Agent
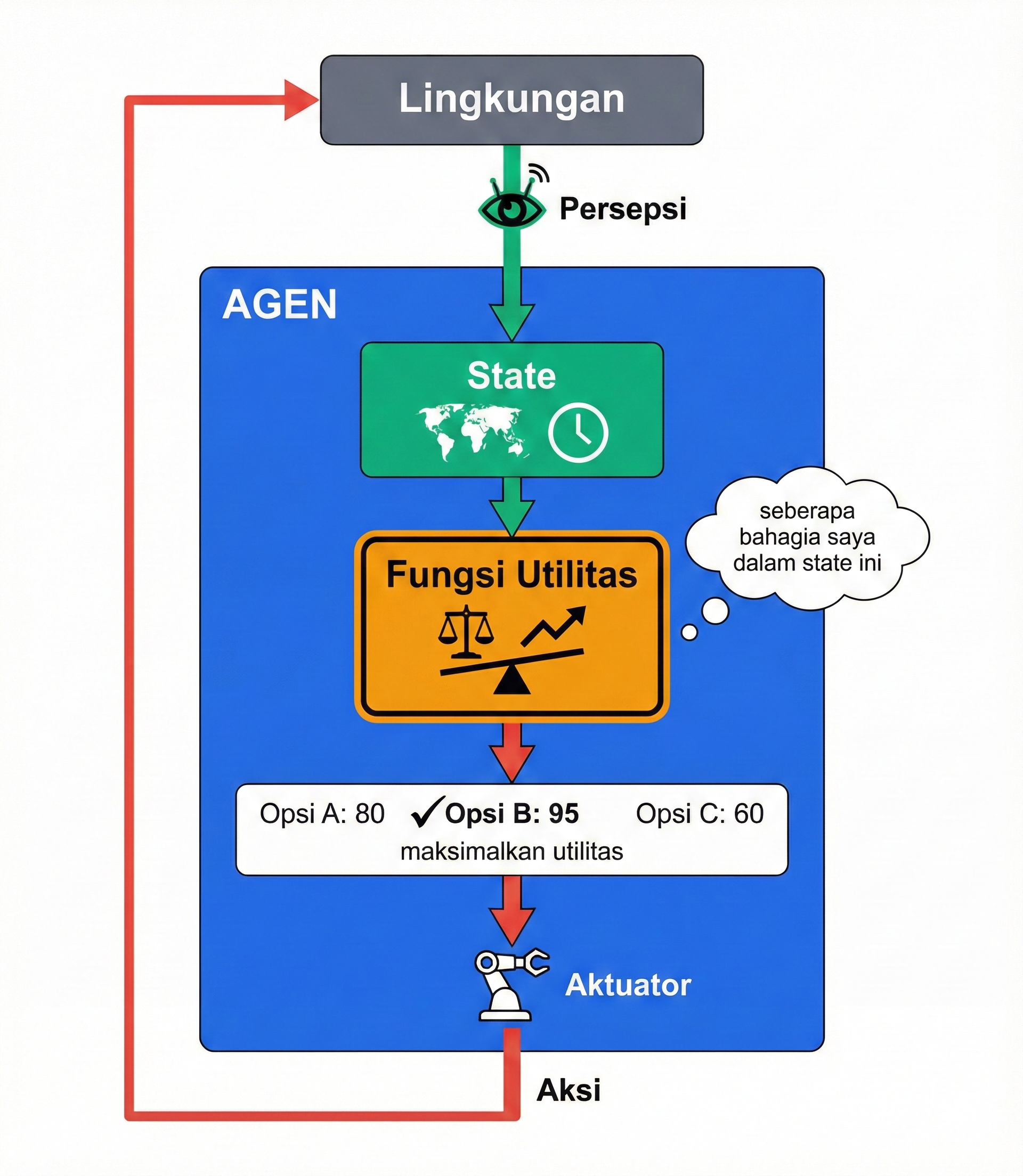
Tambahan dari Goal-Based:
- Utility Function - Mengukur "kebahagiaan"
- Dapat membandingkan alternatif
- Menangani trade-off
Contoh: Self-driving car
Menyeimbangkan: kecepatan, keamanan, kenyamanan
📊 Contoh Utility Function
Skenario: Drone militer memilih target
U(target) = Military_Value × Survival_Prob - Fuel_Cost
| Target | Value | Survival | Fuel Cost | Utility |
|---|---|---|---|---|
| A | 80 | 0.70 | 20 | 36 |
| B ⭐ | 60 | 0.90 | 10 | 44 |
| C | 100 | 0.50 | 30 | 20 |
Target B optimal meskipun value-nya bukan tertinggi!
5️⃣ Learning Agent
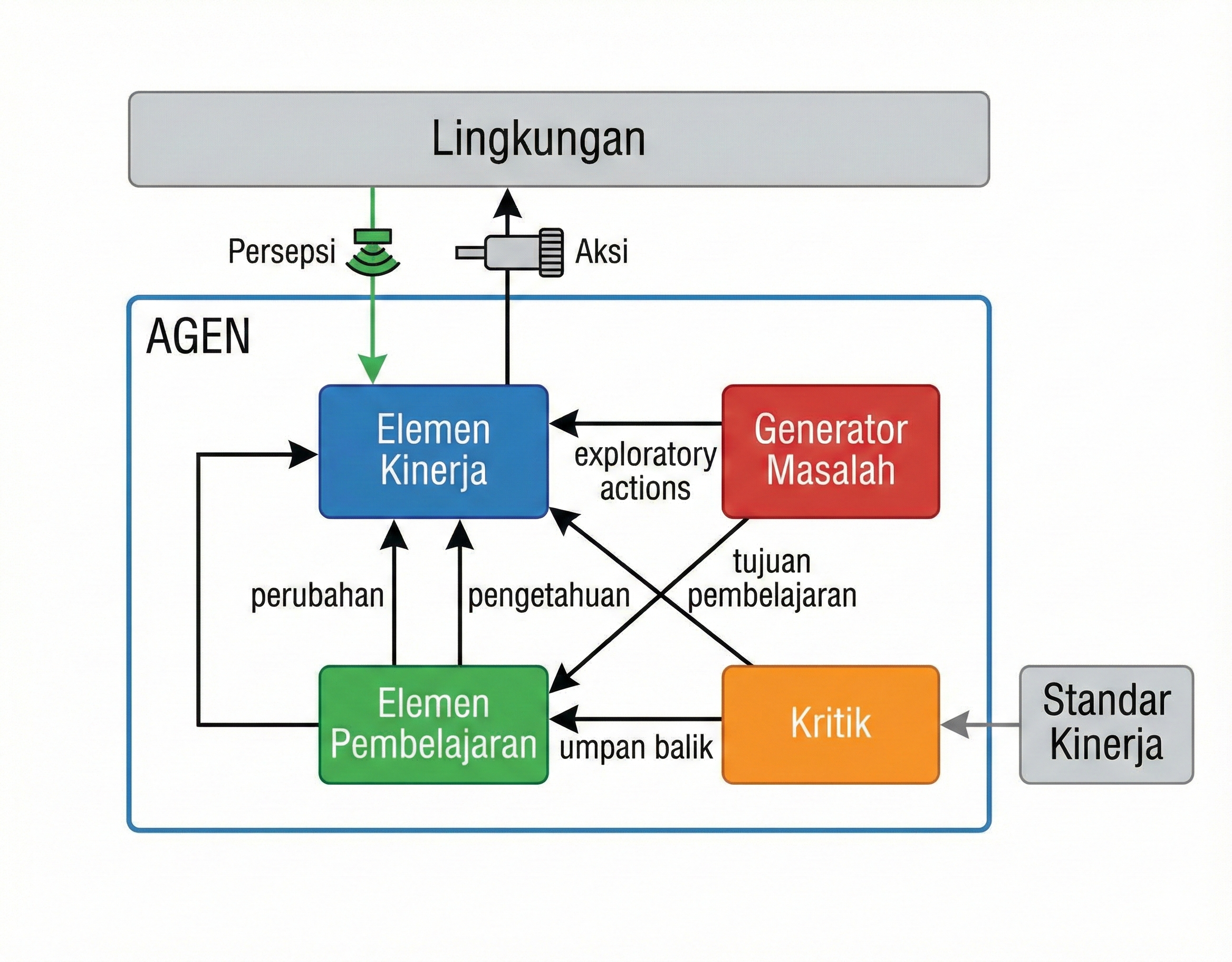
Dapat meningkatkan kinerja dari pengalaman
Komponen Learning Agent
| Komponen | Fungsi |
|---|---|
| Elemen Kinerja | Memilih tindakan (seperti agen biasa) |
| Elemen Pembelajaran | Memperbaiki elemen kinerja |
| Kritik | Mengevaluasi performa |
| Generator Masalah | Menyarankan eksplorasi |
📌 Akan dibahas lebih dalam di Pertemuan 13-14 (Machine Learning)
📋 Perbandingan Jenis Agen
| Jenis Agen | State? | Goal? | Utility? | Belajar? |
|---|---|---|---|---|
| Simple Reflex | ❌ | ❌ | ❌ | ❌ |
| Model-Based Reflex | ✅ | ❌ | ❌ | ❌ |
| Goal-Based | ✅ | ✅ | ❌ | ❌ |
| Utility-Based | ✅ | ✅ | ✅ | ❌ |
| Learning | ✅ | ✅ | ✅ | ✅ |
🌍 Karakteristik Lingkungan Tugas
Enam dimensi untuk menganalisis lingkungan:
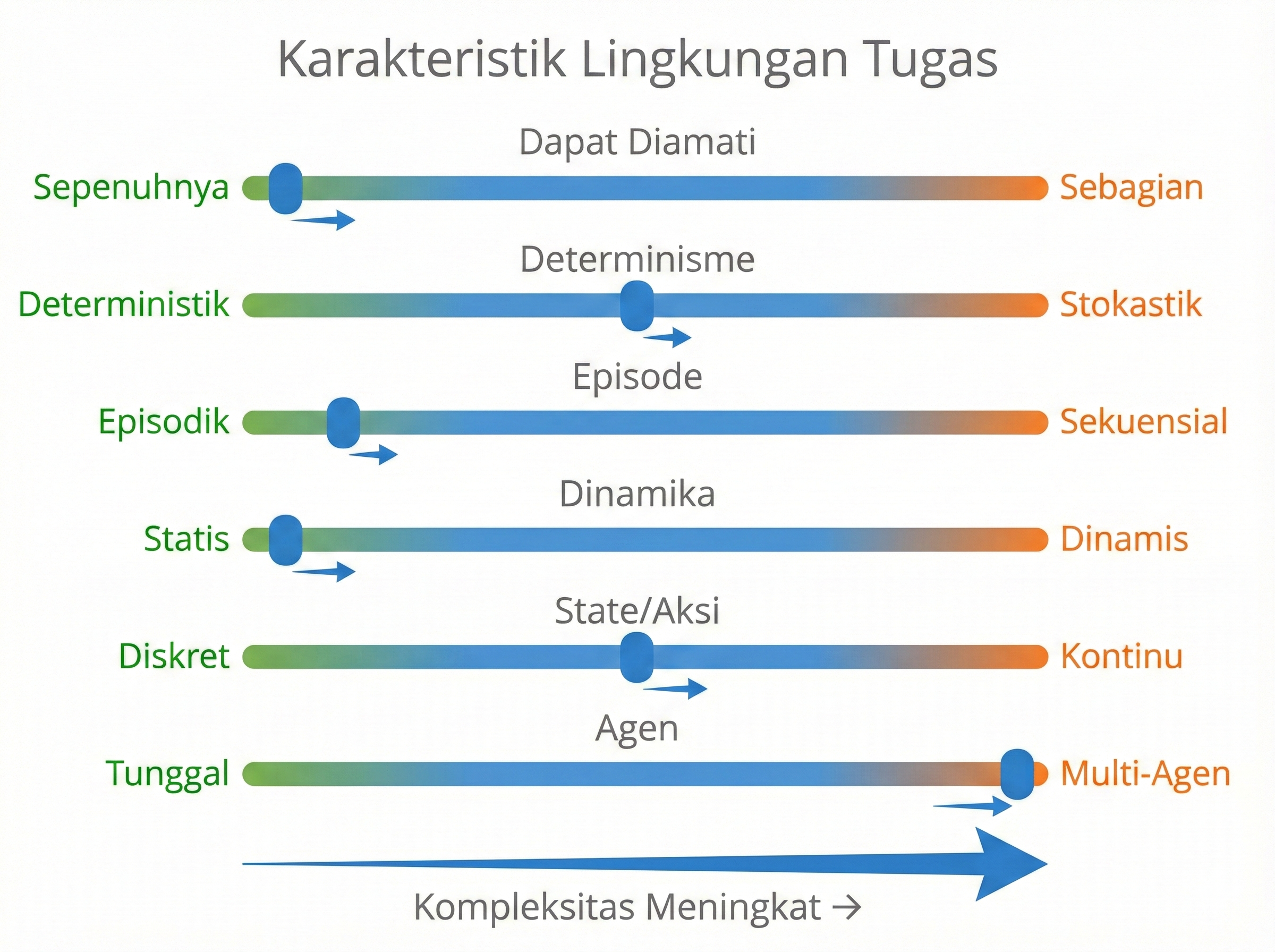
👁️ Observable
Fully Observable
Agen dapat melihat seluruh state lingkungan
Contoh: Permainan catur
Partially Observable
Agen hanya melihat sebagian state
Contoh: Poker, self-driving car
⚠️ Partially observable → perlu internal state!
🎲 Deterministic vs Stochastic
Deterministik
State berikutnya pasti ditentukan oleh state dan aksi
Contoh: Catur
Stokastik
Ada elemen ketidakpastian
Contoh: Backgammon (ada dadu)
🔄 Episodic vs Sequential
Episodik
Episode independen, keputusan tidak mempengaruhi episode lain
Contoh: Klasifikasi gambar
Sekuensial
Keputusan saat ini mempengaruhi keputusan masa depan
Contoh: Permainan catur
⏱️ Static vs Dynamic
Statis
Lingkungan tidak berubah saat agen berpikir
Contoh: Crossword puzzle
Dinamis
Lingkungan dapat berubah kapan saja
Contoh: Combat drone
📌 Semi-dynamic: Lingkungan tidak berubah, tapi skor/waktu berubah (catur dengan timer)
📊 Discrete vs Continuous
Diskret
State dan action dapat dihitung
Contoh: Permainan papan
Kontinu
State/action dalam rentang kontinu
Contoh: Robot navigasi (posisi x, y, z)
👥 Single vs Multi-Agent
Agen Tunggal
Hanya satu agen di lingkungan
Contoh: Sudoku solver
Multi-Agen
Beberapa agen berinteraksi
Cooperative: Bekerja sama
Competitive: Bersaing
📋 Kerangka PEAS
| Komponen | Pertanyaan |
|---|---|
| Performance | Bagaimana mengukur kesuksesan? |
| Environment | Apa saja yang ada di lingkungan? |
| Actuators | Apa yang dapat dilakukan agen? |
| Sensors | Apa yang dapat dipersepsi agen? |
📝 Contoh PEAS: Automated Taxi
| Komponen | Spesifikasi |
|---|---|
| Performance | Keselamatan, waktu tempuh, kenyamanan, efisiensi BBM |
| Environment | Jalan, lalu lintas, pejalan kaki, rambu, cuaca |
| Actuators | Kemudi, akselerator, rem, klakson |
| Sensors | Kamera, LIDAR, GPS, speedometer |
🎖️ Contoh PEAS: UAV Pengintai
| Komponen | Spesifikasi |
|---|---|
| Performance | Area coverage, detection rate, survival rate |
| Environment | Airspace, terrain, target, ancaman, cuaca |
| Actuators | Flight controls, camera gimbal, transmitter |
| Sensors | Cameras (visual, thermal), radar, GPS, altimeter |
🧠 Quiz Time!
Pertanyaan 1:
Pendekatan AI mana yang paling banyak diadopsi dalam AI modern?
🧠 Quiz Time!
Pertanyaan 2:
Jenis agen apa yang diperlukan untuk lingkungan partially observable?
💡 Model-based agent memiliki internal state untuk menyimpan informasi yang tidak terlihat
🧠 Quiz Time!
Pertanyaan 3:
Lingkungan permainan catur (tanpa timer) memiliki karakteristik:
| Observable | Fully Observable |
| Determinism | Deterministik |
| Episode | Sekuensial |
| Dynamics | Statis |
| State/Action | Diskret |
| Agents | Multi-Agent (Competitive) |
📝 Ringkasan
| Konsep | Poin Kunci |
|---|---|
| AI | Sistem yang meniru kecerdasan manusia |
| 4 Pendekatan | Think/Act × Human/Rational |
| Agen | Sensor → Agent Function → Aktuator |
| 5 Jenis Agen | Simple Reflex → Learning Agent |
| 6 Karakteristik | Observable, Deterministic, Episodic, Static, Discrete, Single |
| PEAS | Performance, Environment, Actuators, Sensors |
📅 Pertemuan Berikutnya
Pertemuan 02: Uninformed Search
Pemecahan Masalah dengan Pencarian
- Formulasi masalah pencarian
- Breadth-First Search (BFS)
- Depth-First Search (DFS)
- Uniform-Cost Search (UCS)
📚 Referensi
- Russell, S. & Norvig, P. (2020). Artificial Intelligence: A Modern Approach (4th Ed.). Pearson. Chapter 1-2
- Poole, D.L. & Mackworth, A.K. (2023). Artificial Intelligence: Foundations of Computational Agents (3rd Ed.). Cambridge University Press. Chapter 1.
- CS188 Berkeley AI Materials: https://inst.eecs.berkeley.edu/~cs188/
Terima Kasih
🤖 Kecerdasan Artifisial
Pertemuan 01: Pengantar AI dan Agen Cerdas
Ada pertanyaan?