Kecerdasan Artifisial
Pertemuan 03
Pencarian Heuristik
Informed Search
Mata Kuliah: Kecerdasan Artifisial (AI401) | 3 SKS
🎯 Capaian Pembelajaran
Setelah pertemuan ini, mahasiswa mampu:
- Menjelaskan konsep heuristik sebagai estimasi biaya
- Mengimplementasikan Greedy Best-First Search
- Mengimplementasikan algoritma A*
- Menjelaskan properti admissibility dan consistency
- Merancang fungsi heuristik yang baik
- Menganalisis optimalitas dan kompleksitas A*
📝 Review: Uninformed Search
Pertemuan sebelumnya kita belajar:
- BFS - Eksplorasi per level
- DFS - Eksplorasi sedalam mungkin
- UCS - Eksplorasi berdasarkan g(n)
Masalah: Tidak tahu arah goal!
🔍 Masalah Uninformed Search
BFS/UCS mengeksplorasi ke semua arah termasuk yang menjauh dari goal!
💡 Solusi: Informed Search
"Gunakan pengetahuan tentang domain masalah untuk mengarahkan pencarian!"
Pengetahuan ini disebut HEURISTIK
📚 Apa itu Heuristik?
Heuristik h(n) adalah fungsi yang memberikan estimasi biaya dari node n ke goal terdekat.
- h(n) ≥ 0 untuk semua node n
- h(goal) = 0
- Semakin kecil h(n), semakin dekat ke goal
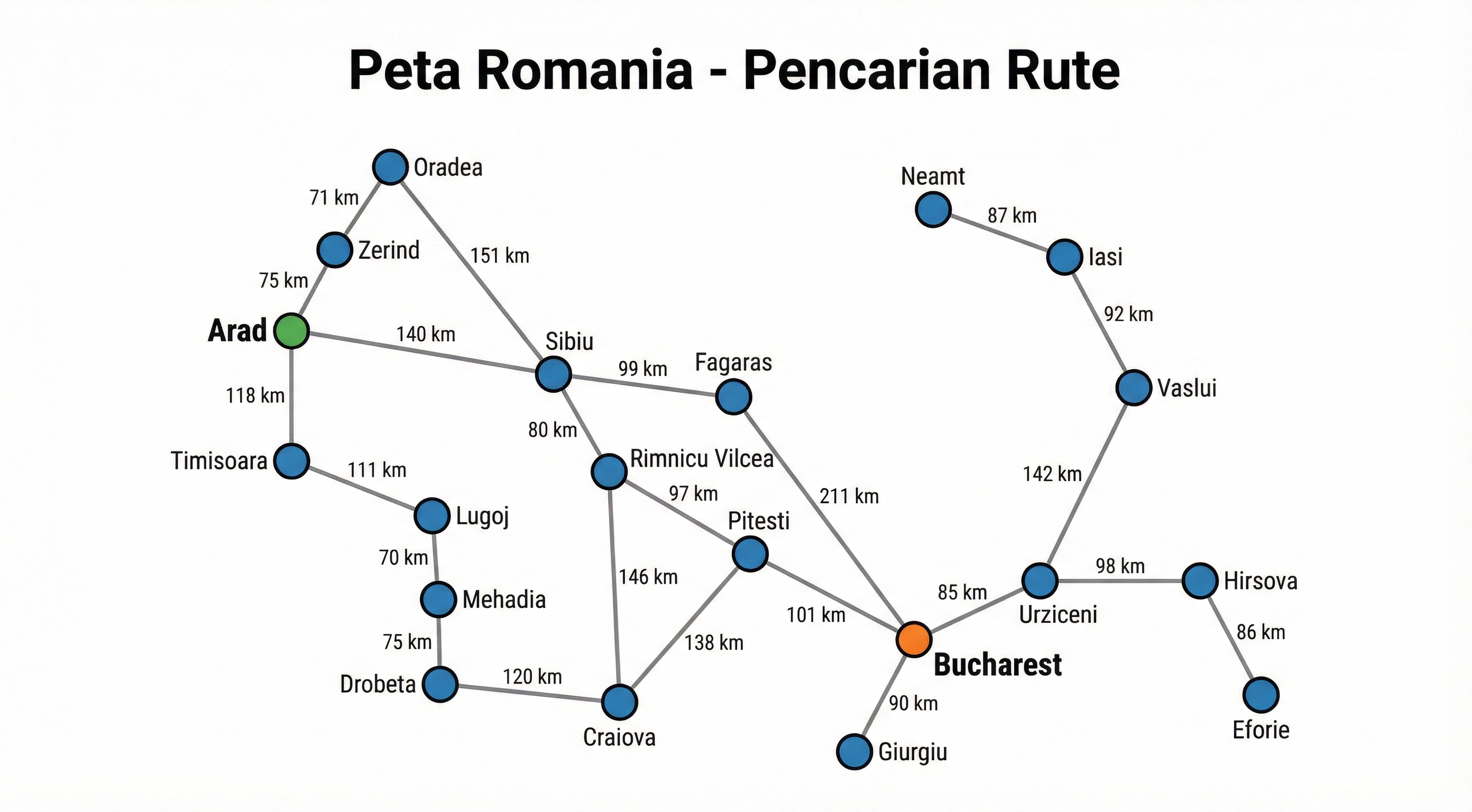
📏 Contoh: Straight-Line Distance
Untuk pencarian rute: jarak garis lurus ke goal
| Kota | hSLD ke Bucharest |
|---|---|
| Arad | 366 km |
| Sibiu | 253 km |
| Fagaras | 176 km |
| Pitesti | 100 km |
| Bucharest | 0 km |
📐 Contoh: Manhattan Distance
Untuk grid-based problems (8-puzzle, pathfinding):
Jumlah jarak horizontal + vertikal setiap tile ke posisi goalnya
🧩 Contoh Manhattan: 8-Puzzle
Current:
┌───┬───┬───┐ │ 2 │ 8 │ 3 │ ├───┼───┼───┤ │ 1 │ 6 │ 4 │ ├───┼───┼───┤ │ 7 │ │ 5 │ └───┴───┴───┘
Goal:
┌───┬───┬───┐ │ 1 │ 2 │ 3 │ ├───┼───┼───┤ │ 4 │ 5 │ 6 │ ├───┼───┼───┤ │ 7 │ 8 │ │ └───┴───┴───┘
hManhattan = 1+1+0+2+2+1+0+2 = 9
🏃 Greedy Best-First Search
Selalu ekspansi node dengan h(n) terkecil
- Hanya menggunakan h(n)
- Mengabaikan biaya yang sudah ditempuh g(n)
- "Greedy" = serakah, pilih yang terlihat terbaik
📝 Algoritma Greedy BFS
def greedy_best_first_search(problem, h):
frontier = PriorityQueue() # ordered by h(n)
frontier.push(initial_state)
explored = set()
while not frontier.empty():
node = frontier.pop() # h(n) terkecil
if goal_test(node):
return solution(node)
explored.add(node)
for successor in expand(node):
if successor not in explored:
frontier.push(successor)
return failure
🔄 Trace Greedy BFS
Arad → Bucharest:
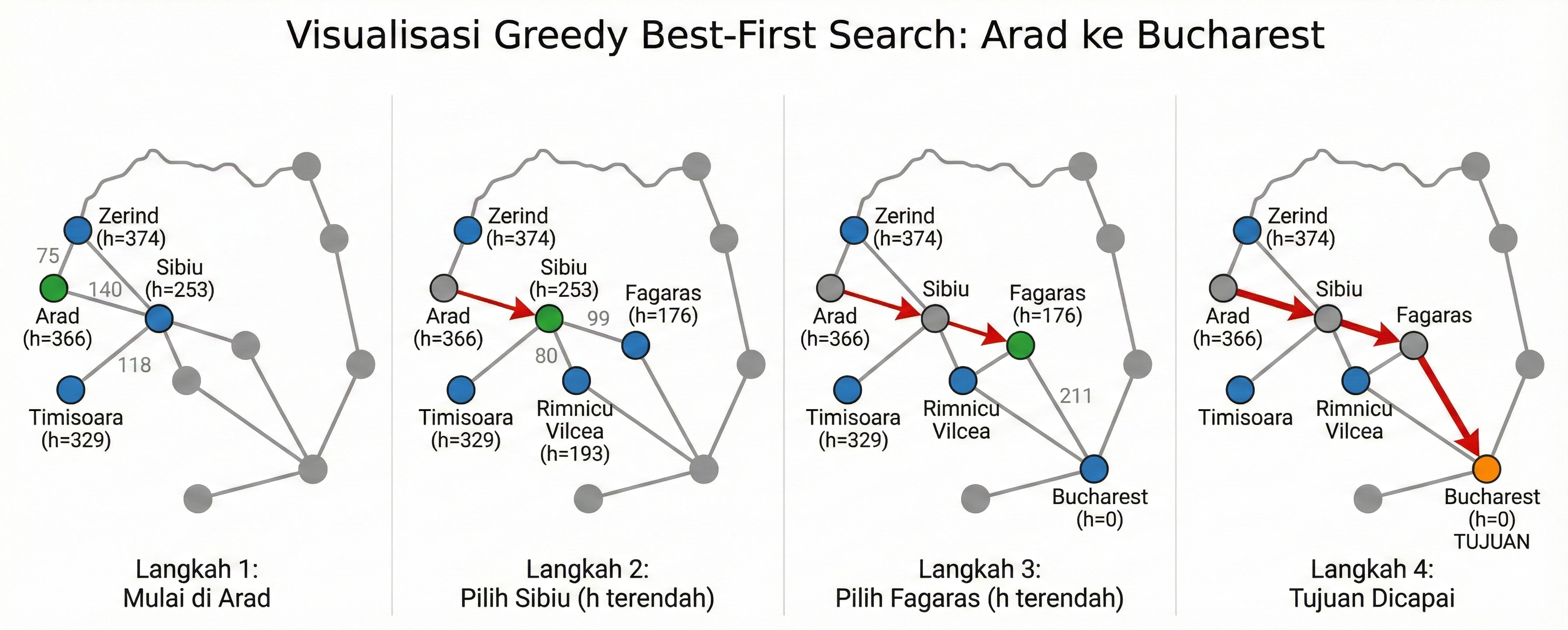
📊 Greedy BFS: Step by Step
- Start: Arad (h=366)
- Neighbors: Zerind(374), Sibiu(253), Timisoara(329)
- Pilih Sibiu → Neighbors: Fagaras(176), RV(193)
- Pilih Fagaras → Neighbor: Bucharest(0)
- Goal! Path: Arad→Sibiu→Fagaras→Bucharest
Hanya 4 node diekspansi!
⚠️ Masalah Greedy BFS
❌ Tidak Optimal
Bisa menemukan path yang lebih panjang
❌ Tidak Complete
Bisa terjebak di infinite loop
Path Greedy: 450 km vs Optimal: 418 km
⭐ Algoritma A*
"Kombinasi terbaik dari UCS dan Greedy!"
- g(n) = biaya aktual dari start ke n
- h(n) = estimasi biaya dari n ke goal
- f(n) = estimasi total cost melalui n
📊 Perbandingan Algoritma
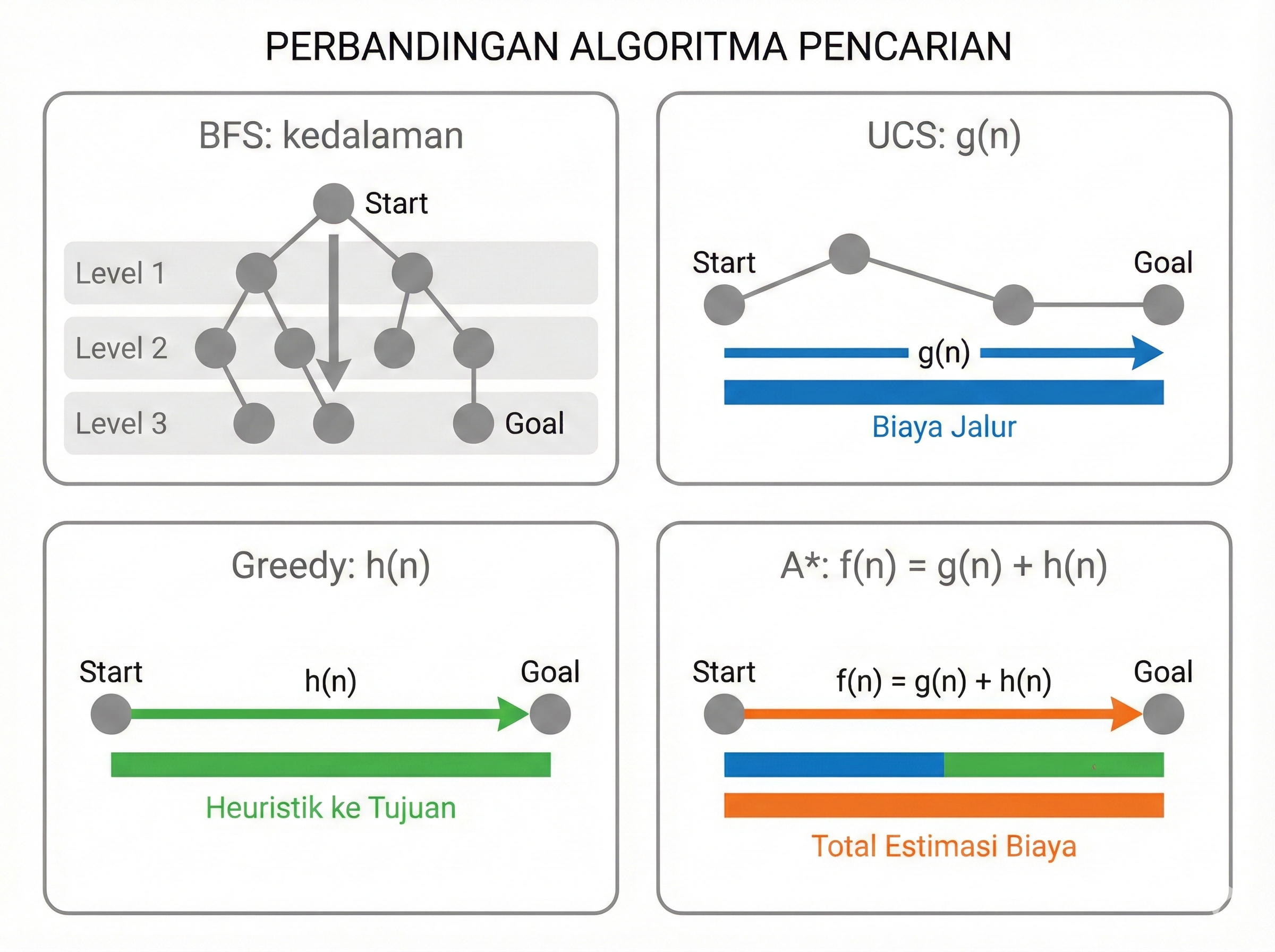
📋 Tabel Perbandingan
| Algoritma | f(n) | Optimal? | Informed? |
|---|---|---|---|
| BFS | depth | ✓ (unit cost) | ❌ |
| UCS | g(n) | ✓ | ❌ |
| Greedy | h(n) | ❌ | ✓ |
| A* | g(n)+h(n) | ✓ | ✓ |
📝 Algoritma A*
def a_star_search(problem, h):
frontier = PriorityQueue() # ordered by f(n)
start = Node(initial_state, g=0)
start.f = start.g + h(start.state)
frontier.push(start)
while not frontier.empty():
node = frontier.pop() # f(n) terkecil
if goal_test(node):
return solution(node)
for successor in expand(node):
successor.g = node.g + cost(node, successor)
successor.f = successor.g + h(successor.state)
if successor not in explored:
frontier.push(successor)
🔄 Trace A*: Arad → Bucharest
| Step | Node | g | h | f |
|---|---|---|---|---|
| 1 | Arad | 0 | 366 | 366 |
| 2 | Sibiu | 140 | 253 | 393 |
| 3 | RimnicuV | 220 | 193 | 413 |
| 4 | Fagaras | 239 | 176 | 415 |
| 5 | Pitesti | 317 | 100 | 417 |
| 6 | Bucharest | 418 | 0 | 418 |
Path: Arad→Sibiu→RV→Pitesti→Bucharest = 418 km ✓
📈 A* vs UCS: Efisiensi
UCS
~11 nodes expanded
Eksplorasi tanpa arah
A*
6 nodes expanded
Terarah ke goal!
Kedua menemukan path optimal 418 km
✅ Admissibility
Heuristik admissible jika tidak pernah overestimate biaya sebenarnya:
untuk semua n, dimana h*(n) = biaya sebenarnya
Contoh: Straight-line distance selalu ≤ jarak jalan
🏆 Teorema Optimalitas A*
Teorema: Jika h(n) admissible, maka A* adalah OPTIMAL
A* akan menemukan solusi dengan biaya minimum!
🔗 Consistency (Monotonicity)
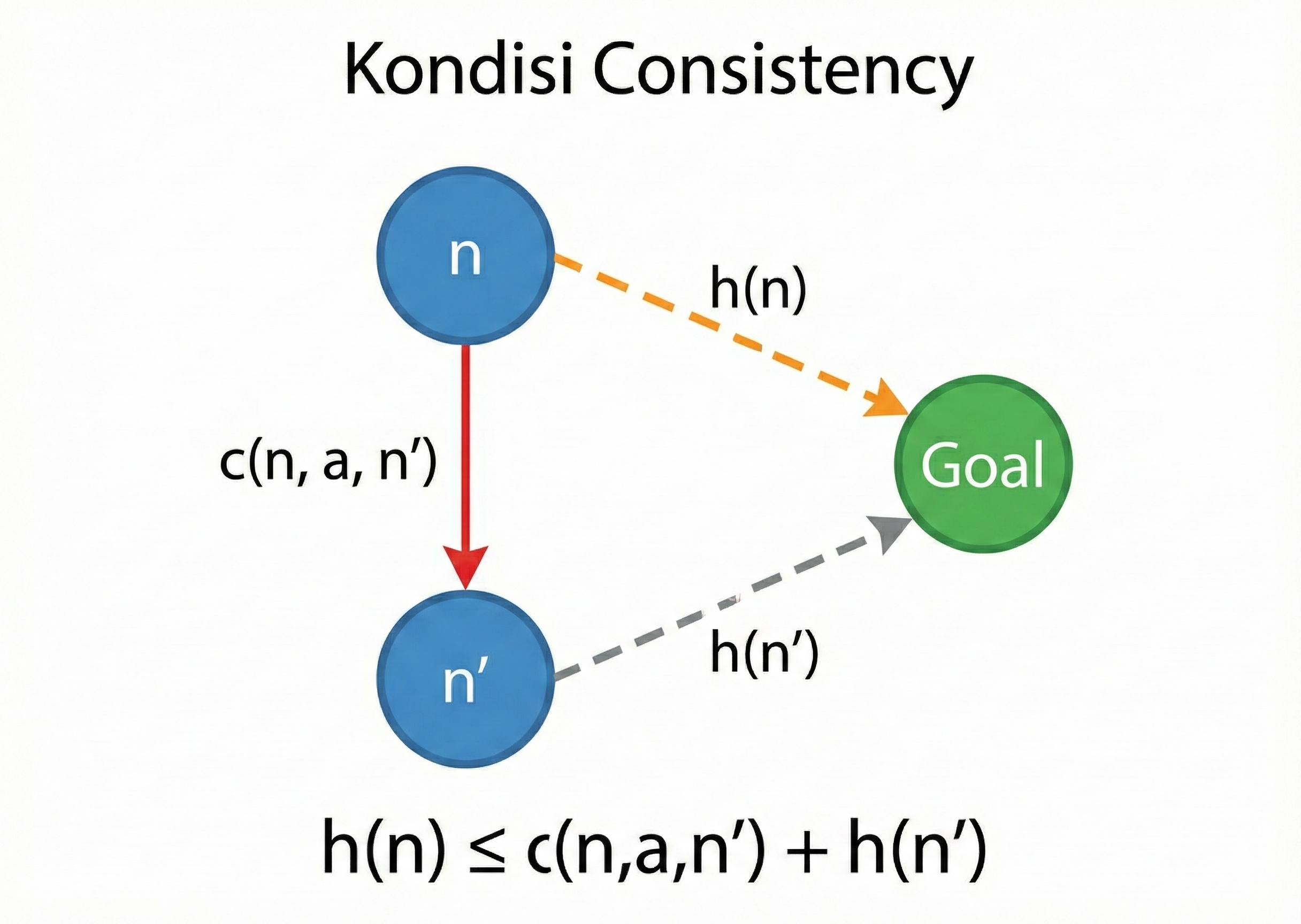
Ketidaksamaan segitiga!
📌 Implikasi Consistency
- Setiap consistent heuristic adalah admissible
- f(n) tidak pernah berkurang sepanjang path
- Node yang sudah diekspansi tidak perlu diekspansi lagi
- Graph search dengan consistent h → optimal!
👑 Dominance
h₂ mendominasi h₁ jika:
dan keduanya admissible
Heuristik yang mendominasi → A* lebih efisien!
Contoh: Manhattan > Misplaced Tiles
🧠 Quiz Time!
Soal 1: Jika h(n) = 0 untuk semua n, algoritma apa yang dihasilkan A*?
- BFS
- DFS
- UCS ✓
- Greedy BFS
Penjelasan: f(n) = g(n) + 0 = g(n)
🧠 Quiz Time!
Soal 2: Mana yang BUKAN properti heuristik admissible?
- h(n) ≤ h*(n)
- h(goal) = 0
- h(n) selalu sama dengan h*(n) ✓
- h(n) ≥ 0
Admissible = tidak overestimate, bukan harus exact
🛠️ Merancang Heuristik
Teknik: Relaxed Problem
Hilangkan beberapa constraint dari masalah asli. Biaya optimal dari relaxed problem → heuristik admissible!
🧩 Relaxation untuk 8-Puzzle
| Relaxation | Heuristik |
|---|---|
| Tile bisa teleport ke mana saja | Misplaced Tiles |
| Tile bisa menembus tile lain | Manhattan Distance |
| Tidak ada relaxation | h* (biaya sebenarnya) |
Semakin sedikit relaxation → heuristik lebih informatif
🔀 Kombinasi Heuristik
Jika h₁ dan h₂ keduanya admissible:
Hasilnya:
- ✓ Tetap admissible
- ✓ Mendominasi h₁ dan h₂
- ✓ A* lebih efisien!
📊 Mengapa A* Optimal?
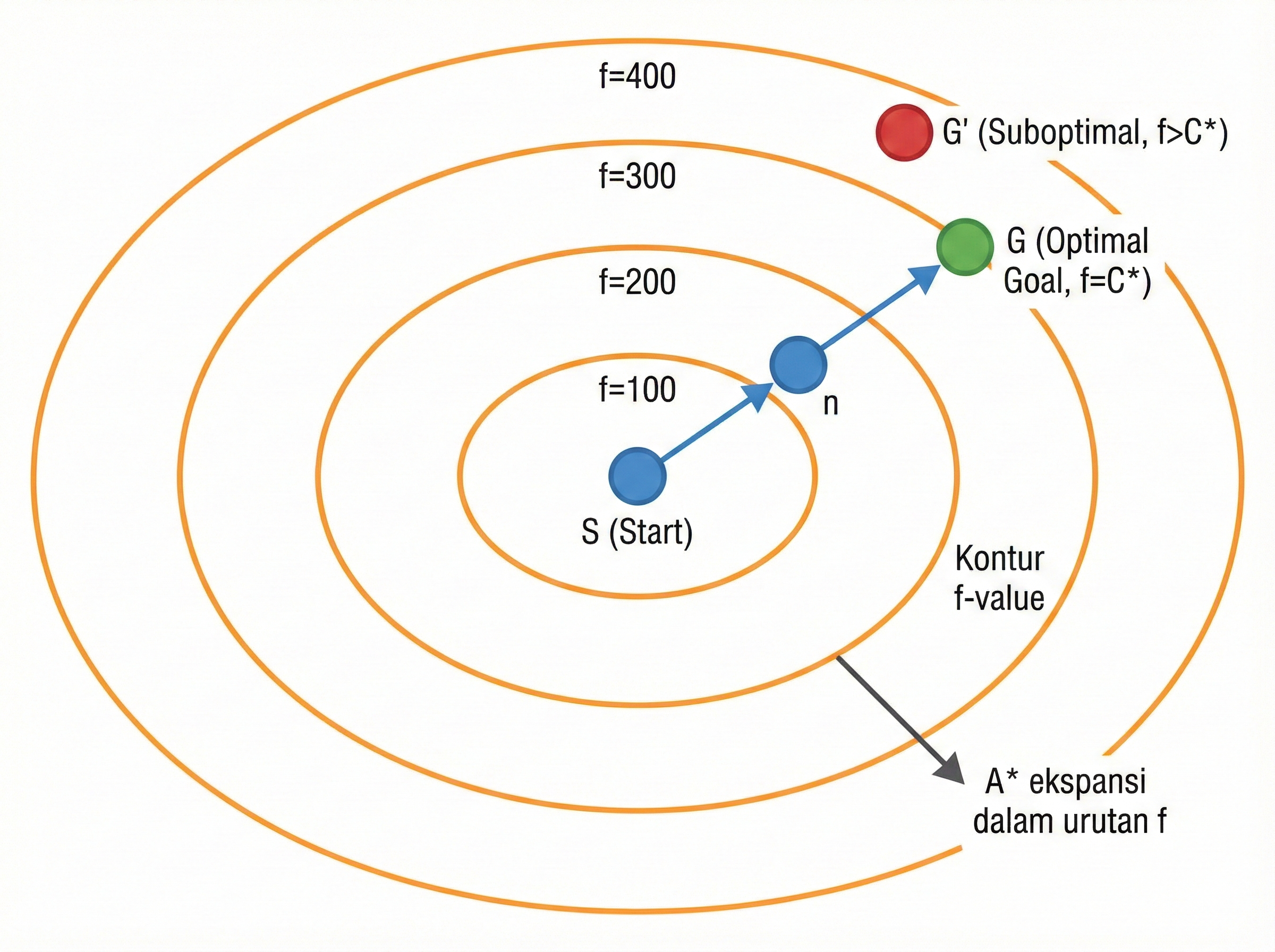
A* ekspansi dalam urutan f-value → goal optimal ditemukan duluan!
⏱️ Kompleksitas A*
| Metrik | Worst Case | Dengan h baik |
|---|---|---|
| Waktu | O(bd) | Mendekati O(d) |
| Ruang | O(bd) | O(bd) |
⚠️ Memori adalah bottleneck utama A*!
💾 IDA* (Iterative Deepening A*)
Solusi untuk masalah memori:
- Gunakan f-limit sebagai cutoff (bukan depth)
- Setiap iterasi naikkan f-limit
- Space: O(bd) - Linear!
- Tetap optimal dengan h admissible
🎮 Aplikasi A*
Games
- NPC pathfinding
- Puzzle solving
- Strategy planning
Real World
- GPS navigation
- Robot motion
- Network routing
🎖️ Aplikasi Pertahanan
- UAV Path Planning - Hindari radar musuh
- SAR Operations - Cari korban optimal
- Tactical Movement - Minimize exposure
- Logistics - Optimal supply routes
🛩️ Heuristik UAV
double heuristic(State n, Target t, vector<Radar>& radars) {
// Jarak ke target
double dist = euclideanDistance(n.pos, t.pos);
// Penalti radar
double penalty = 0;
for (auto& r : radars) {
if (distance(n, r) < r.range)
penalty += r.threat_level;
}
return dist + RADAR_WEIGHT * penalty;
}
🧠 Quiz Time!
Soal 3: Manhattan distance untuk state ini?
Current: [2,1,3,4,5,6,7,8,0] Goal: [1,2,3,4,5,6,7,8,0]
- 1
- 2 ✓
- 3
- 4
Tile 1: jarak 1, Tile 2: jarak 1 → Total = 2
📋 Ringkasan
| Konsep | Definisi |
|---|---|
| Heuristik | Estimasi biaya ke goal |
| Greedy BFS | f(n) = h(n) |
| A* | f(n) = g(n) + h(n) |
| Admissible | h(n) ≤ h*(n) |
| Consistent | h(n) ≤ c + h(n') |
| Dominance | h₂ ≥ h₁ → lebih efisien |
🔑 Key Takeaways
- Heuristik = estimasi biaya ke goal
- A* = UCS + Greedy (terbaik dari keduanya)
- Admissible h → A* optimal
- Heuristik lebih baik → A* lebih cepat
- Relaxed problem → cara membuat heuristik
📅 Pertemuan Berikutnya
Pertemuan 04: Pencarian Lokal dan Optimisasi
Local Search dan Optimization Algorithms
- Hill Climbing
- Simulated Annealing
- Algoritma Genetika
📚 Referensi
- Russell, S. & Norvig, P. (2020). Artificial Intelligence: A Modern Approach (4th Ed.). Pearson. Chapter 3.5-3.6
- Ertel, W. (2017). Introduction to Artificial Intelligence (2nd Ed.). Springer. Chapter 4.
- CS188 Berkeley AI Materials: https://inst.eecs.berkeley.edu/~cs188/
Terima Kasih
🤖 Kecerdasan Artifisial
Pertemuan 03: Pencarian Heuristik - Informed Search
Ada pertanyaan?